Loading...
Searching...
No Matches
RF24Mesh_Ncurses_Master.cpp
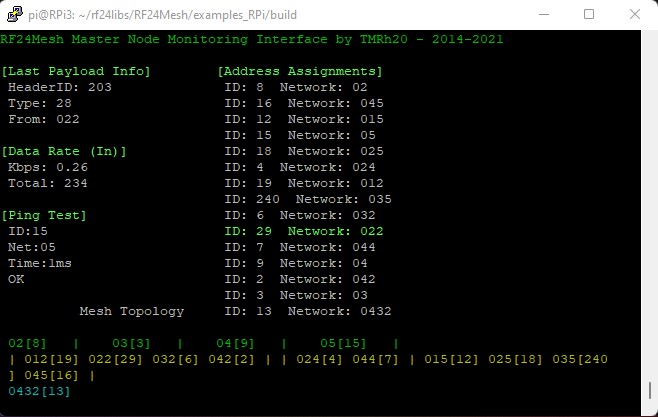
A very limited ncurses interface used for initial monitoring/testing of RF24Mesh
/*
* RF24Mesh Master Node Monitoring Tool
* This is a generic tool for master nodes running RF24Mesh that will display address
* assignments, and information regarding incoming data, regardless of the specific
* configuration details.
*
* Requirements: NCurses
* Install NCurses: apt-get install libncurses5-dev
* Setup:
* 1. cd ~/RF24Mesh/examples_RPi
* 2. mkdir build && cd build
* 3. cmake ..
* 4. make
* 5. ./ncurses/RF24Mesh_Ncurses_Master
*
* NOTE: RF24MESH_DEBUG MUST BE DISABLED IN RF24Mesh_config.h
*
* Once configured and running, the interface will display the header information, data rate,
* and address assignments for all connected nodes.*
* The master node will also continuously ping each of the child nodes, one per second, while indicating
* the results.
*
*/
#include <ncurses.h>
#include "RF24Mesh/RF24Mesh.h"
#include <RF24/RF24.h>
#include <RF24Network/RF24Network.h>
RF24 radio(22, 0);
RF24Network network(radio);
RF24Mesh mesh(radio, network);
void printNodes(uint8_t boldID);
void pingNode(uint8_t listNo);
uint8_t nodeCounter;
uint16_t failID = 0;
WINDOW* win;
WINDOW* topoPad;
void drawTopology();
int nodeY, nodeX = 0;
int maxY, maxX = 0;
int main()
{
printf("Establishing mesh...\n");
mesh.setNodeID(0);
if (!mesh.begin()) {
// if mesh.begin() returns false for a master node, then radio.begin() returned false.
printf("Radio hardware not responding.\n");
return 0;
}
radio.printDetails();
win = initscr(); /* Start curses mode */
getmaxyx(win, maxX, maxY);
start_color();
curs_set(0);
//keypad(stdscr, TRUE); //Enable user interaction
init_pair(1, COLOR_GREEN, COLOR_BLACK);
init_pair(2, COLOR_BLUE, COLOR_GREEN);
init_pair(3, COLOR_MAGENTA, COLOR_BLACK);
init_pair(4, COLOR_YELLOW, COLOR_BLACK);
init_pair(5, COLOR_CYAN, COLOR_BLACK);
topoPad = newpad(31, 75);
attron(COLOR_PAIR(1));
printw("RF24Mesh Master Node Monitoring Interface by TMRh20 - 2014-2022\n");
attroff(COLOR_PAIR(1));
refresh(); /* Print it on to the real screen */
uint32_t kbTimer = 0, kbCount = 0, pingTimer = millis();
unsigned long totalPayloads = 0;
uint8_t boldID = 0;
while (1)
{
// Call mesh.update to keep the network updated
mesh.update();
// In addition, keep the 'DHCP service' running on the master node so addresses will
// be assigned to the sensor nodes
mesh.DHCP();
attron(A_BOLD | COLOR_PAIR(1));
mvprintw(2, 0, "[Last Payload Info]\n");
attroff(A_BOLD | COLOR_PAIR(1));
// Check for incoming data from the sensors
while (network.available()) {
RF24NetworkHeader header;
network.peek(header);
// Print the total number of received payloads
mvprintw(9, 0, " Total: %lu\n", totalPayloads++);
kbCount++;
// Read the network payload
network.read(header, 0, 0);
// Display the header info
mvprintw(3, 0, " HeaderID: %u \n Type: %d \n From: 0%o \n ", header.id, header.type, header.from_node);
for (uint8_t i = 0; i < mesh.addrListTop; i++) {
if (header.from_node == mesh.addrList[i].address) {
boldID = mesh.addrList[i].nodeID;
}
}
}
printNodes(boldID);
if (millis() - kbTimer > 1000) {
kbTimer = millis();
attron(A_BOLD | COLOR_PAIR(1));
mvprintw(7, 0, "[Data Rate (In)]");
attroff(A_BOLD | COLOR_PAIR(1));
mvprintw(8, 0, " Kbps: %.2f", (kbCount * 32 * 8) / 1000.00);
kbCount = 0;
}
// Ping each connected node, one per second
if (millis() - pingTimer > 1003 && mesh.addrListTop > 0) {
pingTimer = millis();
if (nodeCounter == mesh.addrListTop) {
nodeCounter = 0;
}
pingNode(nodeCounter);
nodeCounter++;
drawTopology();
}
/*
uint32_t nOK, nFails;
network.failures(&nFails, &nOK);
attron(A_BOLD | COLOR_PAIR(1));
mvprintw(2, 24, "[Transmit Results] ");
attroff(A_BOLD | COLOR_PAIR(1));
mvprintw(3, 25, " #OK: %u ", nOK);
mvprintw(4, 25, " #Fail: %u ", nFails);
*/
prefresh(topoPad, 0, 0, 18, 1, maxX - 1, maxY - 2);
refresh();
delay(2);
} //while 1
endwin(); /* End curses mode */
return 0;
}
void printNodes(uint8_t boldID)
{
uint8_t xCoord = 2;
attron(A_BOLD | COLOR_PAIR(1));
mvprintw(xCoord++, 27, "[Address Assignments]\n");
attroff(A_BOLD | COLOR_PAIR(1));
for (uint8_t i = 0; i < mesh.addrListTop; i++) {
if (failID == mesh.addrList[i].nodeID) {
attron(COLOR_PAIR(2));
}
else if (boldID == mesh.addrList[i].nodeID) {
attron(A_BOLD | COLOR_PAIR(1));
}
mvprintw(xCoord++, 28, "ID: %d Network: 0%o ", mesh.addrList[i].nodeID, mesh.addrList[i].address);
attroff(A_BOLD | COLOR_PAIR(1));
attroff(COLOR_PAIR(2));
}
//mvprintw(xCoord++, 28, " ");
//mvprintw(xCoord++, 28, " ");
//mvprintw(xCoord++, 28, " ");
getyx(win, nodeY, nodeX);
}
void pingNode(uint8_t listNo)
{
attron(A_BOLD | COLOR_PAIR(1));
mvprintw(11, 0, "[Ping Test]\n");
attroff(A_BOLD | COLOR_PAIR(1));
RF24NetworkHeader headers(mesh.addrList[listNo].address, NETWORK_PING);
uint32_t pingtime = millis();
bool ok = false;
if (headers.to_node) {
ok = network.write(headers, 0, 0);
if (ok && failID == mesh.addrList[listNo].nodeID) {
failID = 0;
}
if (!ok) {
failID = mesh.addrList[listNo].nodeID;
}
}
pingtime = millis() - pingtime;
mvprintw(12, 0, " ID:%d ", mesh.addrList[listNo].nodeID);
mvprintw(13, 0, " Net:0%o ", mesh.addrList[listNo].address);
mvprintw(14, 0, " Time:%ums ", pingtime);
if (ok || !headers.to_node) {
mvprintw(15, 0, " OK ");
}
else {
attron(A_BOLD);
mvprintw(15, 0, " FAIL");
attroff(A_BOLD);
}
}
/****************************************************************************************/
void drawTopology()
{
wclear(topoPad);
wattroff(topoPad, COLOR_PAIR(1));
mvprintw(17, 10, "Mesh Topology");
mvwaddch(topoPad, nodeY > 15 ? nodeY - 16 : 0, 0, 0);
wattron(topoPad, COLOR_PAIR(1));
int topoPadmaxX;
topoPadmaxX = getmaxx(topoPad);
for (int i = 01; i < 06; i++) {
for (int j = 0; j < mesh.addrListTop; j++) {
if (mesh.addrList[j].address == i) {
wprintw(topoPad, "0%o[%d] | ", mesh.addrList[j].address, mesh.addrList[j].nodeID);
}
}
}
wprintw(topoPad, "\n");
wattron(topoPad, COLOR_PAIR(4));
uint16_t g = 051;
for (int h = 011; h <= 015; h++) {
for (int i = h; i <= g; i += 010) {
for (int j = 0; j < mesh.addrListTop; j++) {
if (mesh.addrList[j].address == i) {
int x = getcurx(topoPad);
if (x >= topoPadmaxX) wprintw(topoPad, "\n");
wprintw(topoPad, "0%o[%d] ", mesh.addrList[j].address, mesh.addrList[j].nodeID);
}
}
}
g++;
wprintw(topoPad, "| ");
}
wprintw(topoPad, "\n");
wattron(topoPad, COLOR_PAIR(5));
g = 0411;
for (int h = 0111; h <= 0145; h++) {
for (int i = h; i <= g; i += 0100) {
for (int j = 0; j < mesh.addrListTop; j++) {
if (mesh.addrList[j].address == i) {
int x = getcurx(topoPad);
if (x >= topoPadmaxX) wprintw(topoPad, "\n");
wprintw(topoPad, "0%o[%d] ", mesh.addrList[j].address, mesh.addrList[j].nodeID);
}
}
}
g++;
}
wprintw(topoPad, "\n");
wattron(topoPad, COLOR_PAIR(3));
g = 04111;
for (int h = 01111; h <= 01445; h++) {
for (int i = h; i <= g; i += 01000) {
for (int j = 0; j < mesh.addrListTop; j++) {
if (mesh.addrList[j].address == i) {
int x = getcurx(topoPad);
if (x >= topoPadmaxX) wprintw(topoPad, "\n");
wprintw(topoPad, "0%o[%d] ", mesh.addrList[j].address, mesh.addrList[j].nodeID);
}
}
}
g++;
}
wattroff(topoPad, COLOR_PAIR(2));
}
Generated on for RF24Mesh - Automated Networking for nrf24L01 & nrf52x radios by